Prototyping PSLab Android App using Invision
Often, while designing apps, we need planning and proper designing before actually building the apps. This is where mock-up tools and prototyping is useful. While designing user interfaces, the first step is usually creating mockups. Mockups give quite a good idea about the appearance of various layouts of the app. However, mockups are just still images and they don’t give a clue about the user experience of the app. This is where prototyping tools are useful. Prototyping helps to get an idea about the user experience without actually building the app.
Invision is an online prototyping service which was used for initial testing of the PSLab Android app. Some of pictures below are the screenshots of our prototype taken in Invision. Since, it supports collaboration among developers, it proves to be a very useful tool.
- Using Invision is quite simple. Visit the Invision website and sign up for an account.Before using invision for prototyping, the mockups of the UI layouts must be ready since Invision is simply meant for prototyping and not creating mockups. There are a lot of mock-up tools available online which are quite easy to use.


- Create a new project on Invision. Select the project type – Prototype in this case followed by selecting the platform of the project i.e. Android, iOS etc.

- Collaborators can be added to a project for working together.

-
- After project creation and adding collaborators is done with, the mock-up screens can be uploaded to the project directory
- Select any mock-up screen, the window below appears, there are a few modes available in the bottom navbar – Preview mode, Build mode, Comment mode, Inspect Mode and History Mode.
-
- Preview Mode – View your screen and test the particular screen prototype.
- Build Mode – Assign functionality to buttons, navbars, seek bars, check boxes etc. and other features like transitions.
- Comment Mode – Leave comments/suggestions regarding performance/improvement for other collaborators to read.
- Inspect mode – Check for any unforeseen errors while building.
- History Mode – Check the history of changes on the screen.


-
- Switch to the build mode, it would now prompt to click & drag to create boxes around buttons, check boxes, seek bars etc,(shown above). Once a box ( called as “hotspot” in Invision ), a dialog box pops up asking to assign functionalities.


- The hotspot/box which was selected must link to another menu/layout or result in some action like app closing. This functionality is provided by the “Link To:” option.
- Then the desired gesture for activating the hotspot is selected which can be tap for buttons & check boxes, slide for navbars & seek bars etc from the “Gesture:” option.
- Lastly, the transition resulting due to moving from the hotspot to the assigned window in “Link To:” is selected from the “Transition:” menu.
This process can be repeated for all the screens in the project. Finally for testing and previewing the final build, the screen which appears when the app starts is selected and further navigation, gestures etc. are tested there. So, building prototypes is quite an interesting and easy task.
Additional Resources
- Starter guide to use Invision https://www.lynda.com/Prototyping-tutorials/UX-Design-Tools-InVision/461846-2.html
- Try out Invision https://www.invisionapp.com/


 An example of a pulse sensor designed with just the voltmeter and a digital output of the PSLab.
An example of a pulse sensor designed with just the voltmeter and a digital output of the PSLab.

 Let’s take a look at this circuit. We can clearly see that there is a series combination of a resistor and a capacitor at A and a parallel combination of a resistor and a capacitor at B joining at the non-inverting pin of the OpAmp. The series combination of RC circuit is nothing but a high pass filter that allows only high frequency components to pass through. The parallel combination of RC circuit is a Low pass filter that allows only the low frequency components of a signal to pass through. Once these two are combined, a band pass filter is created allowing only a specific frequency component to pass through.
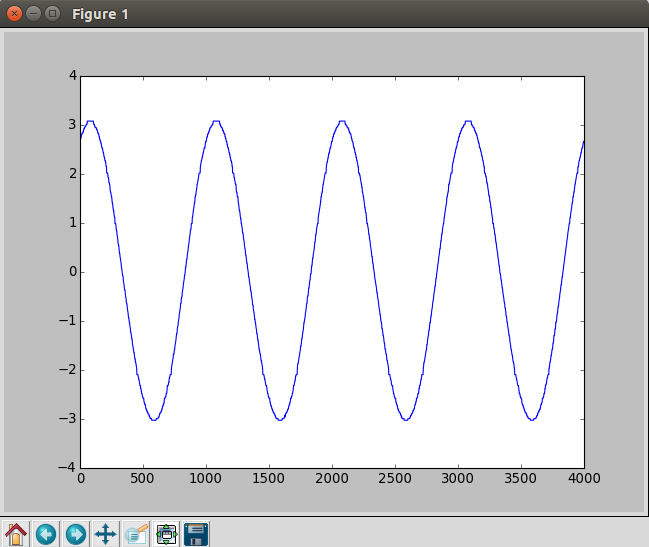
Let’s take a look at this circuit. We can clearly see that there is a series combination of a resistor and a capacitor at A and a parallel combination of a resistor and a capacitor at B joining at the non-inverting pin of the OpAmp. The series combination of RC circuit is nothing but a high pass filter that allows only high frequency components to pass through. The parallel combination of RC circuit is a Low pass filter that allows only the low frequency components of a signal to pass through. Once these two are combined, a band pass filter is created allowing only a specific frequency component to pass through. Using practical values for R as 10k, C value can be approximated to 33nF. This oscillator is capable of generating a stable 500 Hz sinusoidal waveform. By changing the resistive and capacitive values of block A and B, we can generate a wide range of frequencies that are supported by the Op Amp because Op Amps have a limited bandwidth it can be functional inside.
Using practical values for R as 10k, C value can be approximated to 33nF. This oscillator is capable of generating a stable 500 Hz sinusoidal waveform. By changing the resistive and capacitive values of block A and B, we can generate a wide range of frequencies that are supported by the Op Amp because Op Amps have a limited bandwidth it can be functional inside.


 There is a huge drawback with this design. The above calculation is valid only if there is no load impedance is present at the output terminals.
There is a huge drawback with this design. The above calculation is valid only if there is no load impedance is present at the output terminals. Unlike the previous model, this model ensures that the output voltage will be maintained constant across the output terminals within a range of supply voltage values.
Unlike the previous model, this model ensures that the output voltage will be maintained constant across the output terminals within a range of supply voltage values. For a zener diode to maintain a constant voltage level across output terminals, there should be a minimum current flowing through the diode. If this current is not flowing in the zener, there won’t be a regulation. Assume there is a very low load impedance. Then the current supplied by the source will find an easier path to flow other than through the diode. This will affect the regulatory circuit and the desired voltage will not appear across the output terminals.
For a zener diode to maintain a constant voltage level across output terminals, there should be a minimum current flowing through the diode. If this current is not flowing in the zener, there won’t be a regulation. Assume there is a very low load impedance. Then the current supplied by the source will find an easier path to flow other than through the diode. This will affect the regulatory circuit and the desired voltage will not appear across the output terminals.